|
The Vehicle
|
|
General Specs:
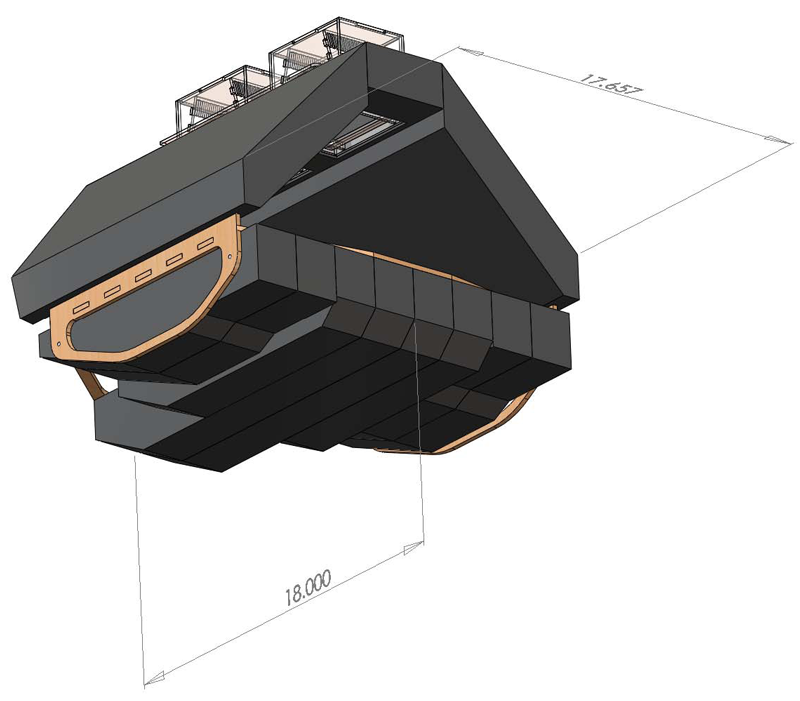
The Atoll Capture Vehicle (ACV) is a mono-hull duel propeller watercraft designed to compete in an atoll capturing competition in the Stanford Meyer Fountain. The body of our vehicle is specifically designed to perform in this arena. The competition area has a powerful waterfall that our capture vehicle was designed to penetrate. The ACV has two layer of waterproofing. The circuits, batteries, and motors all sealed inside of plastic waterproofed containers. These containers are covered by an upper shell formed of polystyrene foam. This upper shell has slanted walls to deflect the waterfall around the craft. This reduces the “dunking” force of the waterfall, allowing the vehicle to safely pass through. The competition area also was fraught with many shallow obstacles, often only an inch below the water’s surface. In order for our vehicle to not be constantly beached, we designed a hull optimized to ride high in the water rather that for hydrodynamic efficiency. Our boat could displace enough water to float approximately 1 inch deep in water. In addition, the propellers are set back into the hull, so they do not protrude dangerously below the hull. In order to maneuver the RFID reader into position to capture and Atoll, we designed the hull with a length to width aspect ratio of about 1:1. We also placed the motors very close to the outer edge of the hull (12+ inches apart). This allowed the ACV to turn in place when a single motor was running. The hull design was also modular. It is composed of 8 separate polystyrene foam hulls held together by two threaded rods. The hulls were then sandwiched between an aircraft plywood laser-cut frame. Thus no adhesives were used and the hull could be disassembled, revised, and reassembled during any phase of the project. |
Overall Vehicle Assembly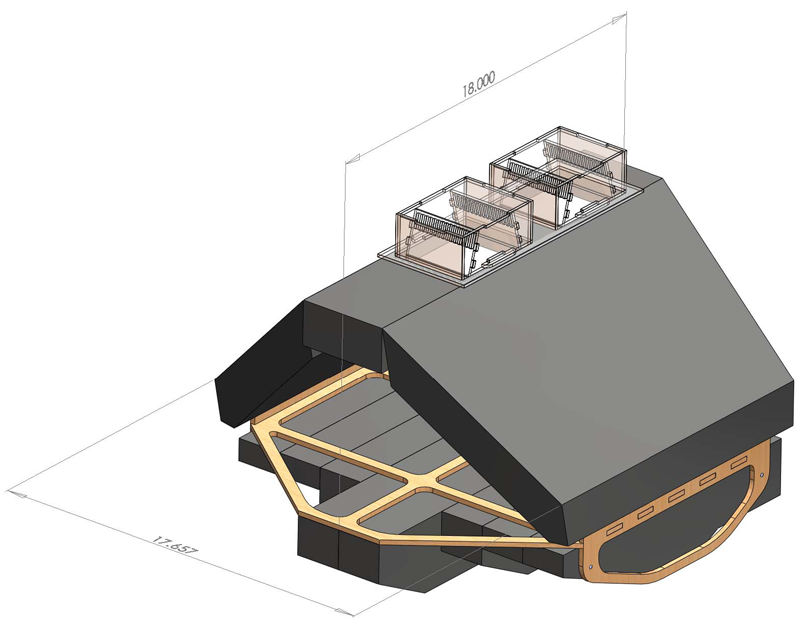
|
|
|
Team Color Display
|
|
|
|
The Controller
|
|
General Specs:
The Capture Vehicle Controller (CVC) is a creative controller for a human to direct the motion of the Atoll Capture Vehicle (ACV). The primary goal of the CVC was to create an inventive and novel controller as well as to explore the use of ultrasonic proximity sensors. The CVC also needs to display to the pilot information about which team controls each atoll. The CVC hand assemblies strap to the user’s right and left hands and protectively house two ultrasonic sensors, preventing the delicate sound transmitter and receiver from being impacted. The right hand’s assembly has a large limit switch mounted as a thumb button. This acts as a “dead man switch,” so ultrasonic throttle data will only be transmitted as long as the switch is pressed. If the switch is released then the ultrasonic data will cease to transmit, the ACV motor control microcontroller will time out, and the boat will immediately turn off its motors. Each hand attachment is connected to the main CVC via shielded cable, which is strain relieved on each side. The central housing of the CVC is chest mounted on the pilot, allowing them to move around actively while controlling the boat. It has a panel with five multi-color LEDs to alert the pilot to atoll captures by either team. It also has a tuning potentiometer to adjust the system to pilots of various heights. |
Chest Plate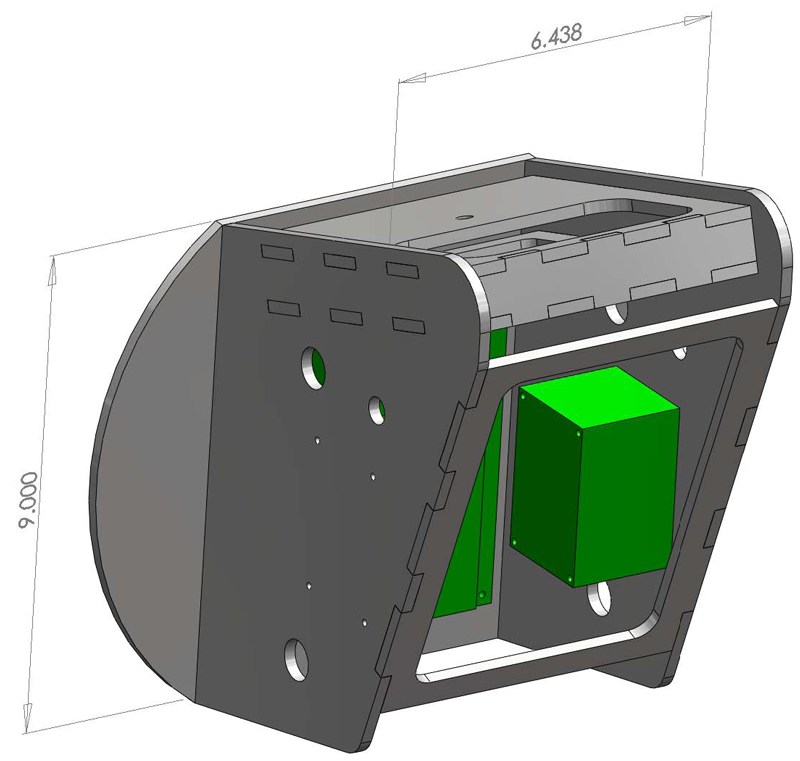
|
Palm Piece
|
|
|

