WE CHECKED OFF!!! Huge shout out to everyone who helped make this possible. Simply, success. Team 2, out.
|
The grading session is tomorrow! We seem to be in good shape. The only issue remaining is that our initial voltage levels for the joystick seem to be changing based on either the battery or charge remaining in the battery. We haven't 100% figured out what's going on, other than the voltage levels occasionally change. This seems weird to us because the voltage is going through a voltage regulator. We are trying to dynamically read the initial voltages and apply an offset to reset the position readings to (0,0). If that doesn't work, we may have to just hard code the offsets for the battery we will use for the grading session.
We are heading into the home stretch. Almost all of the software is good, along with the schematics. We need to hit hardware hard this weekend though. Our PAC hardware is still mostly in its prototype stage, but we have laser cut everything we think we need to assemble the final product. The LOBBYIST hardware is in much better shape. We just need to put the finishing touches on it.
Two of our team members, Will and Zach, will be unavoidably out of town this weekend. Hopefully we can overcome this without having Jeanny and Jordan work too hard. For the past few days, we having been refining both our hardware and our communication software. We implemented the new communication protocol. We tested it from across the room and it seems to be working (*fingers crossed*). On the software side, we are now turning our attention to processing the inputs from the PAC sensors and programming the DMC.
On the hardware side of things, we prototyped new skirt designs. We ultimately went with a soft skirt design that has a smaller area hole at the bottom. The skirt is made out of nylon and seems to be working well. We started cleaning up our circuitry by soldering protoboards and replacing jumpers / alligator clips with soldered wire. We are now into testing stage. The props seem to be acting weird at high pwm duty cycles. We are looking into that. Hovercraft will hopefully be functionally working in the next day or so. This morning we had a meeting with Ed that was very informative. Ed answered questions we had regarding LOBBYIST hardware, power distribution, and skirt design. We discovered our skirt is not flexible enough to withstand perturbations, so we will try to add small slits to help stabilize the LOBBYIST. We are also concerned our motors may be consuming too much current (5A at 6V). We may have to use smaller motors that draw less current or use power resistors to limit the current.
On the software side of things, we were still experiencing strange XBee behavior that we did not understand. Apparently, neither did Ed. He helped us understand how we might create a work-around in our state machines to account for the XBee behavior, but Ed also hinted that the class protocol may need to be revised. We are holding off on communication software until the protocol committee meets and discusses things a little more. For the past two days, we started to implement our sensors. We now can read multiple analog signals from potentiometers to the PIC16F1788. This is great for us because we have 2 potentiometers in our control joystick and 1 potentiometer with our LOBBYIST selection device. On the LOBBYIST side, we think we have mapped the analog signals to PWM signals for our two props. We have not tested the code yet, though. We also hooked up an accelerometer and filtered its signal with a low-pass filter. It looks like we will be able to put the filtered signal through a comparator to register large accelerations. More testing is needed. We would like to use this accel to trigger a pairing event from the PAC to the LOBBYIST. Next up on the software side, we hope to learn how to send PWM signals from the PIC using assembly. This will be needed for the DMC. We continued to make progress on our communications today. We're sending and receiving according to protocol, but having an issue with sending at distance. We're investigating and figuring out how to move forward. We also started thinking about our next LOBBYIST prototype. This will be the third prototype and will incorporate cages for our propellors, a high mounting location for the XBEE, and more secure electrical connections. Our current prototype serves as a good platform for testing software, but we do need to move our design along. Below are two pictures outlining the prop cages and the overall layout of the LOBBYIST. 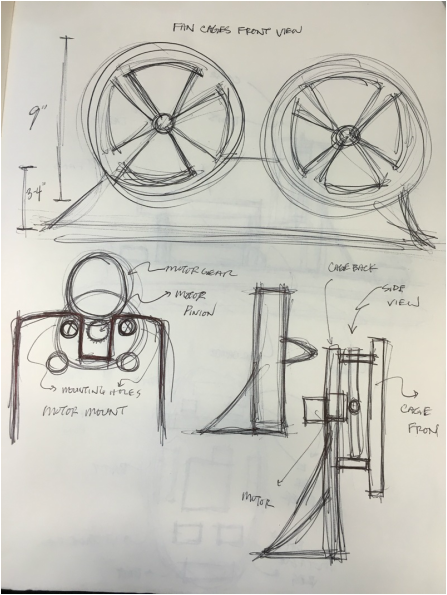 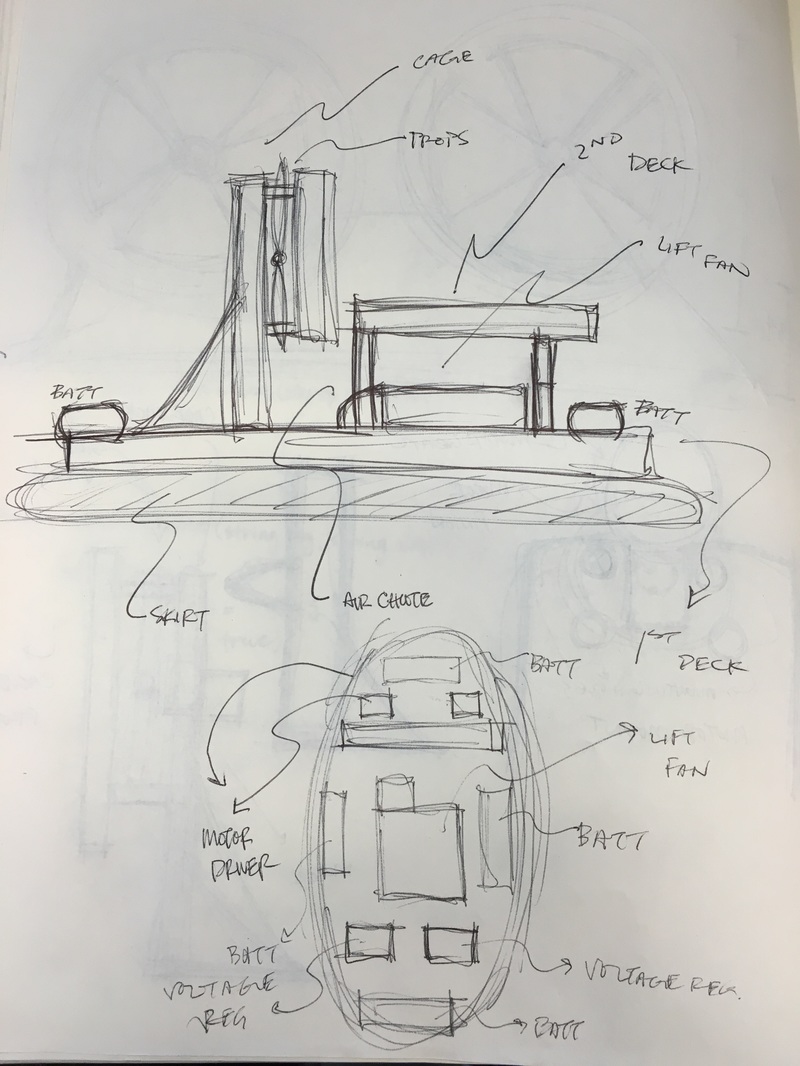 Today, we worked on the communications processing and refined the communication software to reflect the class protocol. Though we are running into a few bugs, we made progress in sending a request to pair and successfully pairing a few times. We have also added batteries on board the LOBBYIST so that we can test the hovercraft untethered. Tomorrow, we will debug the software and work to be able to make the LOBBYIST move via control command sent from the PAC.
Today, we worked on developing our LOBBYIST prototype in order to make it a viable test bed for software/electrical design. We created version 1.5 of our LOBBYIST in the process. This one has better construction than the first prototype, with a focus on the quality of the skirt. We are still using plastic bag material and are considering changing to nylon on the next build.
We are now able to send and receive between PAC and LOBBYIST XBEEs. The next steps with comms include processing the data packets that are sent between the devices and acting on this information. We spent the last three days working on the communication software. Using the advice of our coach, we are using interrupts to drive the communication. The current state is that we are sending properly on both the PAC and LOBBYIST side and receiving on the LOBBYIST side. Complications include that we decided not to use a TIVA for the PAC. We decided it would be a good learning experience to use the PIC16F1788. Right now, we are using keyboard inputs to control the communication, and we plan to update this once we are sure all the communication software is working properly. The following is the PAC Development plan for tomorrow:
After receiving advice from a very knowledgeable teaching team during the design review, we began tackling the project. We learned that we had to be more realistic with our check-point goals and have a more well-developed plan. Our strategy is now to spend the first week mainly focusing on the communication software. We want to get our lifting mechanism working early on, but we will not spend as much time refining the hardware until we get the communication working. Therefore, we started to work on prototyping the skirt right after the design review. We developed several designs, the best seeming to be a semi-taut skirt with a large hole cut our in the middle. With a lift mechanism working now, we plan to work on communication tomorrow. Below is a link to our video of our lift mechanism.
|
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |
 RSS Feed
RSS Feed