Project
The project was to create a hovercraft that can be controlled by any team and a controller that can control any team's hovercraft.
Hovercraft (LOBBYIST):
Controller (PAC):
Hovercraft (LOBBYIST):
- Battery-operated and untethered
- Maximum perimeter of 72''
- Receives control functions via the controller using the provided RF hardware (Xbee24 modules)
- Carries a display system (DMC) that has an electromechanical display of passage of time and indications of team color and paired status
Controller (PAC):
- Relays commands from human operator to LOBBYIST
- Battery-operated and untethered
- Has at least 3 sensing modalities
Competition
|
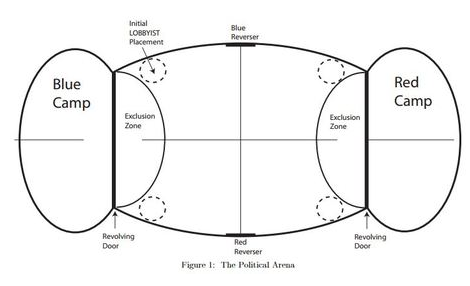
Two teams (red and blue) have to push as many pingpong balls (members of CONGRESS) as they can through a door on their side of the arena. Each team is made up of 3 PACs that must take control of the LOBBYISTs on the field. However, there are only four LOBBYISTS on the arena at a time and after 45 seconds of being paired, the PAC must pair with a different LOBBYIST. Each round lasts 218 seconds.
|
|
Our design
|
Herding the members of CONGRESS reminded us of the way dogs herd sheep. Therefore, we decided to go with a dog theme where a german shepherd would be the star of our hovercraft.
Our LOBBYIST features a happy german shepherd named Sparky who plays on a grassy, green field. The PAC features several of Sparky's favorite toys including a dog bone that contains a joystick for controlling the hovercraft, buttons to unpair or brake, and a switch to choose team color. A ball launcher with an embedded accelerometer is used to pair, and a dog collar that turns a potentiometer is used to choose which LOBBYIST to pair with. |

|