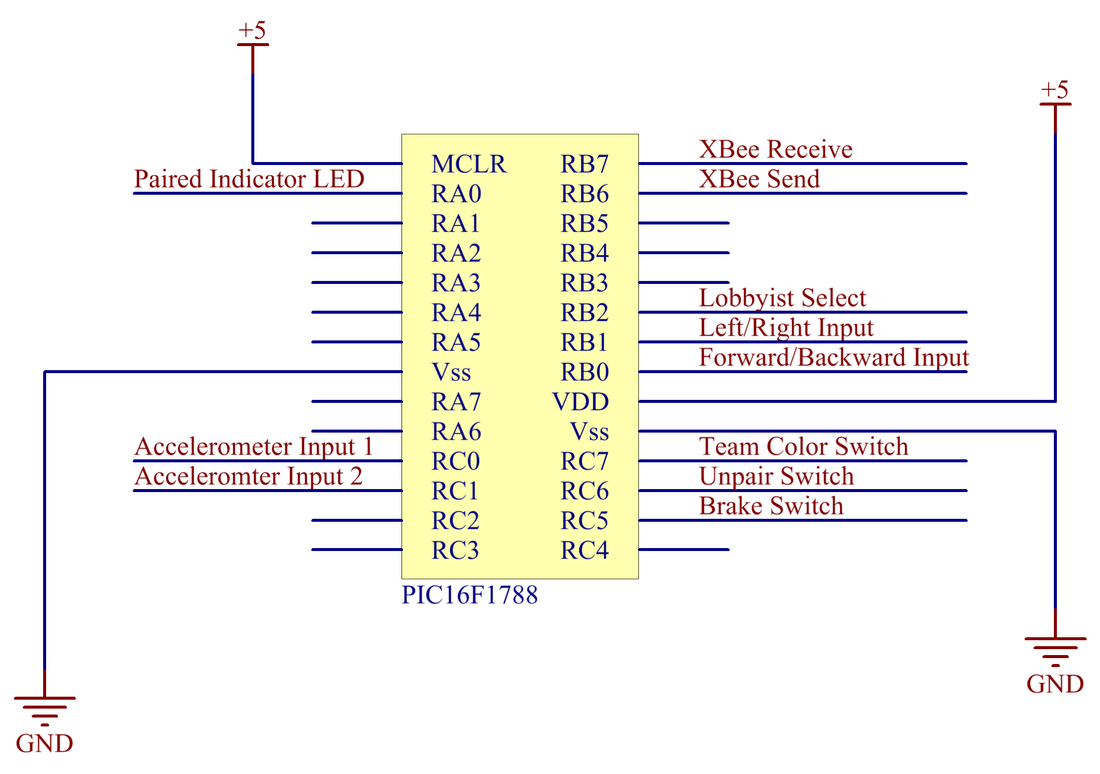
PAC Pinouts
We used a 28-pin PIC16F1788 for our PAC Controller.
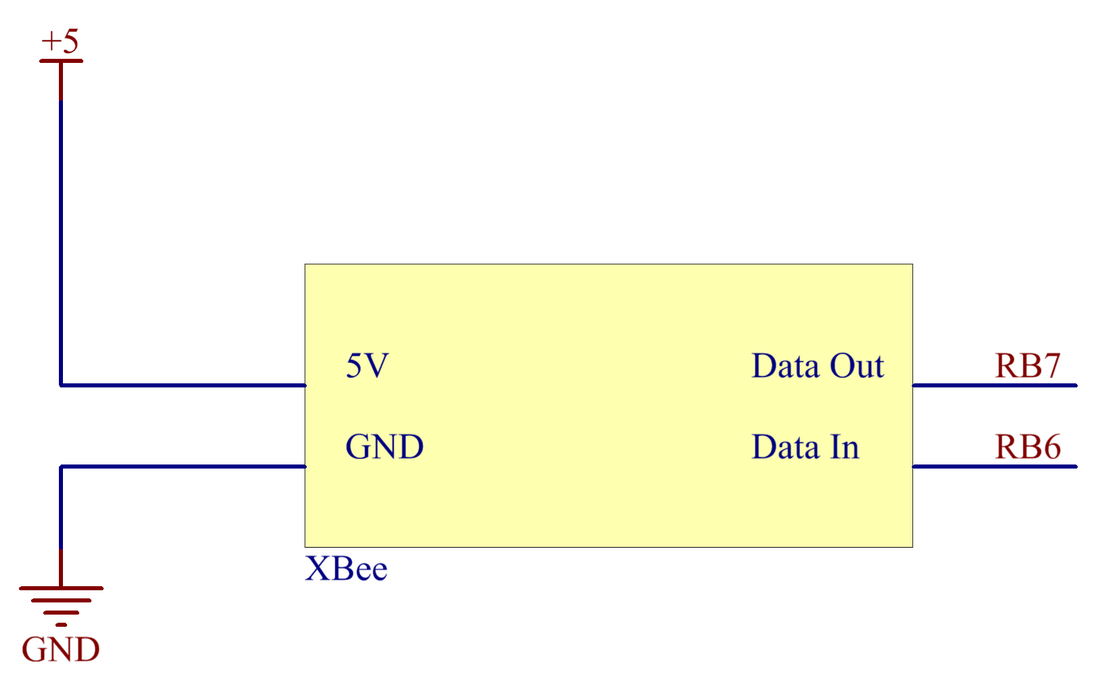
XBee Pinouts
Our XBee was connected to the EUSART of the PIC and to power and ground. The XBee runs on 3.3V but the XBee board regulated a 5V input down to 3.3V.
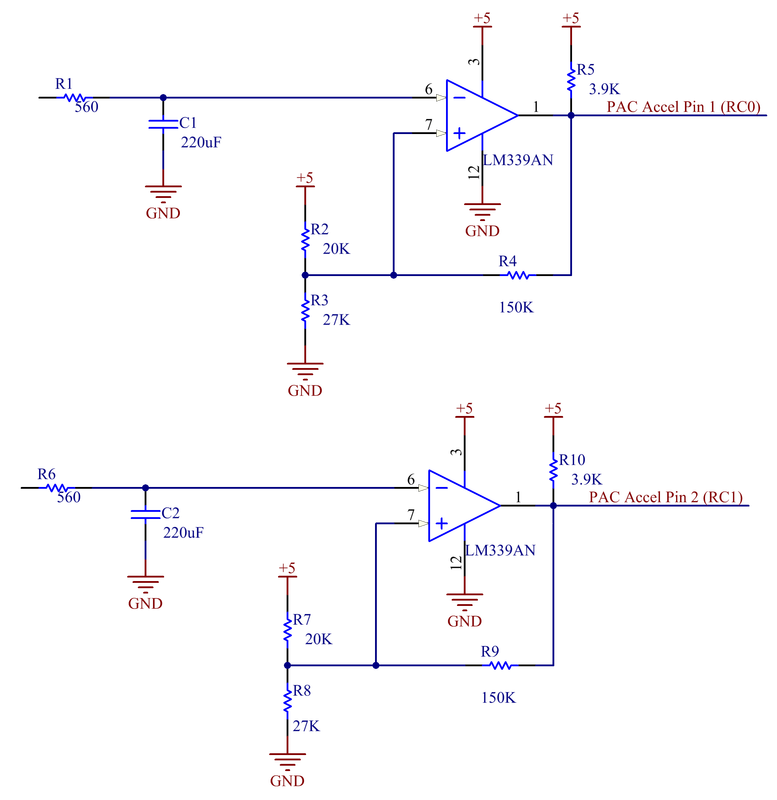
Dog Fetch Accelerometer
We used a two-axis accelerometer which output a PWM signal for each axis. We ran this through a low-pass filter and then through a comparator with hysteresis in order to only output when the acceleration has passed a threshold.
Analog Inputs
Our joystick output two analog outputs, one for each axis. The dog collar we used for selecting the LOBBYIST number was connected to a potentiometer that also output and analog signal.

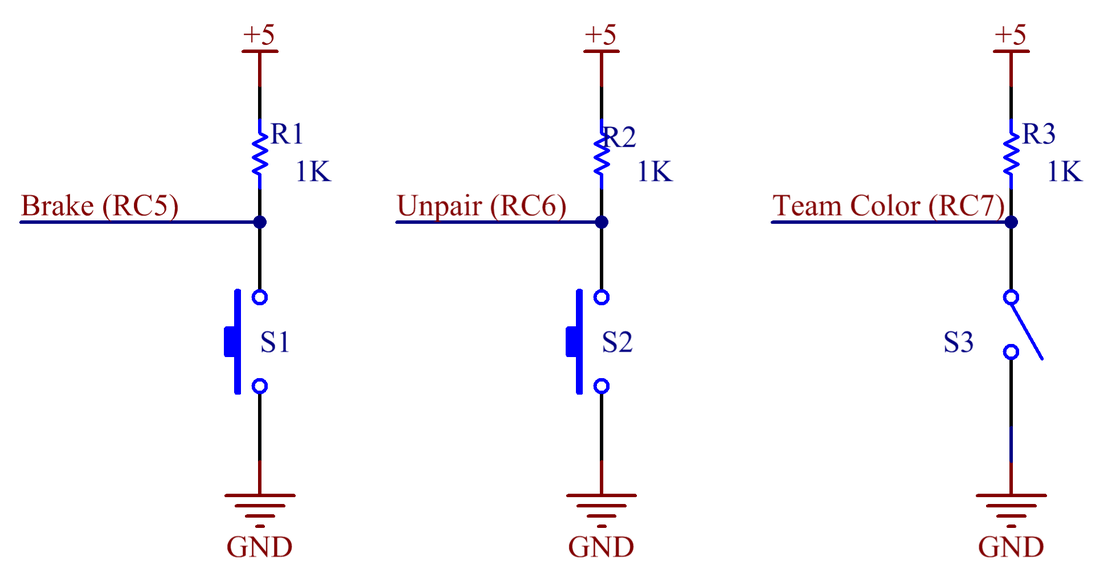
Switches
We used three switches: one for braking, one for unpairing, and one for selecting the team color.
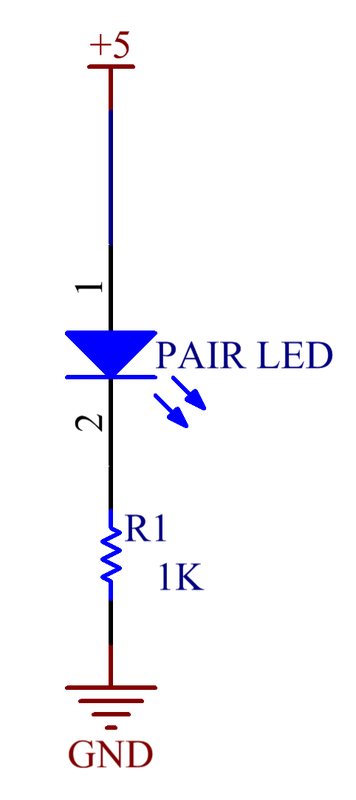
Paired Indicator LED
We used a blue LED to indicate when our PAC was paired with a LOBBYIST.